
本文主要介绍“使用Pytorch进行CNN分析”。在日常操作中,相信很多人对使用Pytorch进行CNN分析有所怀疑。边肖查阅了各种资料,整理出简单易用的操作方法,希望能帮你解答“用Pytorch进行CNN分析”的疑惑!接下来,请和边肖一起学习!
工具
开源深度学习库:PyTorch
数据集:MNIST
实现
初始要求
首先,建立一个基本的基站网络。Pytorch中有以下代码:
classNet(nn。模块):def__init__(自身):super(网络,自身)。__init__()self.conv1=nn。Conv2d(1,20,kernel_size=(5,5),stride=(1,1),padding=0)self.conv2=nn。Conv2d(20,50,kernel_size=(5,5),stride=(1,1),padding=0)self.fc1=nn。线性(4*4*50,500)self.fc2=nn。线性(500,10)defforward(self,X): X=f . max _ pool 2d(self . conv 1(X),2) x=f.max _ pool2d (self.conv2 (x),2) x=x.view (-1,4 * 4 * 50) x=f.relu (self
问题A:预处理


也就是说,需要根据规则读取MNIST数据集,并将其转换为适合处理的格式。这里读取的代码遵循BigDL Python Support的读取方法,可以根据MNIST主页上的数据格式快速读取。密钥块具有读取32位的功能:
def _ read 32(byte stream): dt=numpy . dtype(numpy . uint 32)。new byte order(')#大端模式读取,* * *字节优先(msbfirst)从缓冲区返回numpy . from(byte stream . read(4)),n
bsp;dtype=dt)[0]
读出后是(N, 1, 28, 28)的tensor,每个像素是0-255的值,首先做一下归一化,将所有值除以255,得到一个0-1的值,然后再Normalize,训练集和测试集的均值方差都已知,直接做即可。由于训练集和测试集的均值方差都是针对归一化后的数据来说的,所以刚开始没做归一化,所以forward输出和grad很离谱,后来才发现是这里出了问题。
这部分代码见 preprocessing.py 。
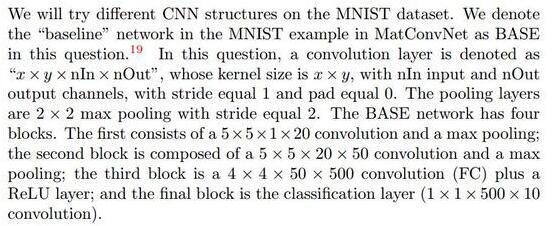
问题B:BASE模型

将random seed设置为0,在前10000个训练样本上学习参数,***看20个epochs之后的测试集错误率。***结果为:
Test set: Average loss: 0.0014, Accuracy: 9732/10000 (97.3%)
可以看到,BASE模型准确率并不是那么的高。
问题C:Batch Normalization v.s BASE

在前三个block的卷积层之后加上Batch Normalization层,简单修改网络结构如下即可:
class Net(nn.Module): def __init__(self): super(Net, self).__init__() self.conv1 = nn.Conv2d(1, 20, kernel_size=(5, 5), stride=(1, 1), padding=0) self.conv2 = nn.Conv2d(20, 50, kernel_size=(5, 5), stride=(1, 1), padding=0) self.fc1 = nn.Linear(4*4*50, 500) self.fc2 = nn.Linear(500, 10) self.bn1 = nn.BatchNorm2d(20) self.bn2 = nn.BatchNorm2d(50) self.bn3 = nn.BatchNorm1d(500) def forward(self, x): x = self.conv1(x) x = F.max_pool2d(self.bn1(x), 2) x = self.conv2(x) x = F.max_pool2d(self.bn2(x), 2) x = x.view(-1, 4*4*50) x = self.fc1(x) x = F.relu(self.bn3(x)) x = self.fc2(x) return F.log_softmax(x)
同样的参数run一下,得出加了BN的结果为:
Test set: Average loss: 0.0009, Accuracy: 9817/10000 (98.2%)
由此可见,有明显的效果提升。
关于Batch Normalization的更多资料参见[2],[5]。
问题D: Dropout Layer

在***一层即 fc2 层后加一个 Dropout(p=0.5) 后,在BASE和BN上的结果分别为:
BASE:Test set: Average loss: 0.0011, Accuracy: 9769/10000 (97.7%) BN: Test set: Average loss: 0.0014, Accuracy: 9789/10000 (97.9%)
观察得知,dropout能够对BASE模型起到一定提升作用,但是对BN模型却效果不明显反而降低了。
原因可能在于,BN模型中本身即包含了正则化的效果,再加一层Dropout显得没有必要反而可能影响结果。
问题E:SK model
SK model: Stacking two 3x3 conv. layers to replace 5x5 conv. layer


如此一番改动后,搭建的SK模型如下:
class Net(nn.Module): def __init__(self): super(Net, self).__init__() self.conv1_1 = nn.Conv2d(1, 20, kernel_size=(3, 3), stride=(1, 1), padding=0) self.conv1_2 = nn.Conv2d(20, 20, kernel_size=(3, 3), stride=(1, 1), padding=0) self.conv2 = nn.Conv2d(20, 50, kernel_size=(3, 3), stride=(1, 1), padding=0) self.fc1 = nn.Linear(5*5*50, 500) self.fc2 = nn.Linear(500, 10) self.bn1_1 = nn.BatchNorm2d(20) self.bn1_2 = nn.BatchNorm2d(20) self.bn2 = nn.BatchNorm2d(50) self.bn3 = nn.BatchNorm1d(500) self.drop = nn.Dropout(p=0.5) def forward(self, x): x = F.relu(self.bn1_1(self.conv1_1(x))) x = F.relu(self.bn1_2(self.conv1_2(x))) x = F.max_pool2d(x, 2) x = self.conv2(x) x = F.max_pool2d(self.bn2(x), 2) x = x.view(-1, 5*5*50) x = self.fc1(x) x = F.relu(self.bn3(x)) x = self.fc2(x) return F.log_softmax(x)
在20个epoch后,结果如下,
SK: Test set: Average loss: 0.0008, Accuracy: 9848/10000 (98.5%)
测试集准确率得到了少许的提高。
这里利用2个3x3的卷积核来代替大的5x5卷积核,参数个数由5x5=25变为了2x3x3=18。实践表明,这样使得计算更快了,并且小的卷积层之间的ReLU也很有帮助。
VGG中就使用了这种方法。
问题F:Change Number of channels
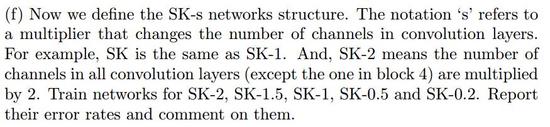
通过将特征图大小乘上一个倍数,再通过shell程序执行,得到如下结果:
SK0.2: 97.7% SK0.5: 98.2% SK1: 98.5% SK1.5: 98.6% SK2: 98.5% (max 98.7%)
在特征图分别为4,10, 30, 40时,最终的准确度基本是往上提升的。这在一定程度上说明,在没有达到过拟合前,增大特征图的个数,即相当于提取了更多的特征,提取特征数的增加有助于精度的提高。
这部分代码见 SK_s.py 和 runSK.sh 。
问题G:Use different training set sizes

同样通过脚本运行,增加参数
parser.add_argument('--usedatasize', type=int, default=60000, metavar='SZ', help='use how many training data to train network')
表示使用的数据大小,从前往后取 usebatchsize 个数据。
这部分程序见 SK_s.py 和 runTrainingSize.sh 。
运行的结果如下:
500: 84.2% 1000: 92.0% 2000: 94.3% 5000: 95.5% 10000: 96.6% 20000: 98.4% 60000: 99.1%
由此可以明显地看出,数据越多,结果的精度越大。
太少的数据无法准确反映数据的整体分布情况,而且容易过拟合,数据多到一定程度效果也会不明显,不过,大多数时候我们总还是嫌数据太少,而且更多的数据获取起来也有一定难度。
问题H:Use different training sets

采用脚本完成,这部分程序见 SK_0.2.py 和 diffTrainingSets.sh 。
运行结果如下:
0-10000: 98.0% 10000-20000: 97.8% 20000-30000: 97.8% 30000-40000: 97.4% 40000-50000: 97.5% 50000-60000: 97.7%
由此可见,采用不同的训练样本集合训练出来的网络有一定的差异,虽不是很大,但是毕竟显示出了不稳定的结果。
问题I:Random Seed’s effects

采用 runSeed.sh 脚本完成,用到了全部60000个训练集。
运行的结果如下:
Seed 0: 98.9% Seed 1: 99.0% Seed 12: 99.1% Seed 123: 99.0% Seed 1234: 99.1% Seed 12345: 99.0% Seed 123456: 98.9%
事实上在用上整个训练集的时候,随机数生成器的种子设置对于***结果的影响不大。
问题J:ReLU or Sigmoid?

将ReLU全部换成Sigmoid后,用全部60000个训练集训练,有对比结果如下:
ReLU SK_0.2: 99.0% igmoid SK_0.2: 98.6%
由此可以看出,在训练CNN时,使用ReLU激活单元比Sigmoid激活单元要更好一些。原因可能在于二者机制的差别,sigmoid在神经元输入值较大或者较小时,输出值会近乎0或者1,这使得许多地方的梯度几乎为0,权重几乎得不到更新。而ReLU虽然增加了计算的负担,但是它能够显著加速收敛过程,并且也不会有梯度饱和问题。
到此,关于“利用Pytorch进行CNN分析”的学习就结束了,希望能够解决大家的疑惑。理论与实践的搭配能更好的帮助大家学习,快去试试吧!若想继续学习更多相关知识,请继续关注网站,小编会继续努力为大家带来更多实用的文章!
内容来源网络,如有侵权,联系删除,本文地址:https://www.230890.com/zhan/93975.html